About Dataset
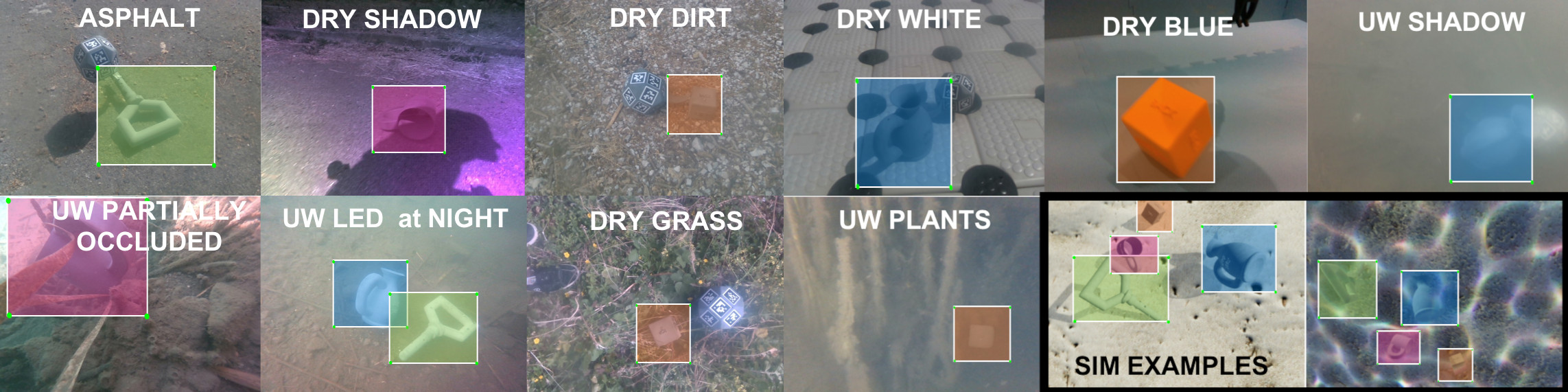
We have developed a comprehensive dataset for object detection and 6D pose estimation in both underwater and dry environments, comprising both synthetic and real-world data. The dataset focuses on four objects of interest for underwater intervention.
Underwater Intervention Application
An example showing the environmental conditions of intervention.
Type of data:
- RGB
- Depth Map
- Mask for single object
- CAD object models
- 2D ground truth labels
- 6D ground truth labels (rotation matrix 3x3 and translation vector 1x3)
Dataset dimensions:
- 33920 sysntetic images
- 87100 real-world images
- Resolution 640 x 480
Data diversity:
- 4 objects
- Syntetic data:
- different sandy background textures
- color lights change randomly, with values chosen in specific ranges to avoid black lights
- lights directions change randomly (lights change their directions starting from the camera position for max 80°)
- object poses are chosen randomly
- Real data:
- 10 different scenes
- 42.5% of images acquired in 4 different underwater conditions
- 57.5% images acquired in 6 different dry scenes
Classes definition:
- 1: Box
- 2: Cup
- 3: Jug
- 4: Hotstab